ホンダの“地図レス”協調AI自動運転が「勾配」で鍛えられる! なぜ小田原市で実証実験を行うのか? 2027年度の“レベル4”認可を目指す
ホンダは、2026年2月に小田原市で協調AI自動運転の実証実験を開始しました。高精度地図を必要としない独自のAI技術を鍛え、社会交通の課題解決を目指します。一体どのような実証内容なのでしょうか。
小田原の起伏に富んだ公道が「自動運転の未来」を切り拓く鍵に
ホンダの研究開発子会社である本田技術研究所、神奈川県、小田原市の3者は2026年2月18日、小田原市における自動運転技術の実証実験について説明会を開催しました。

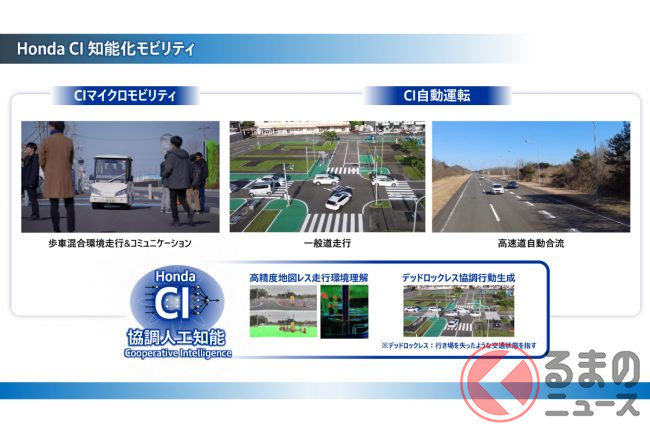
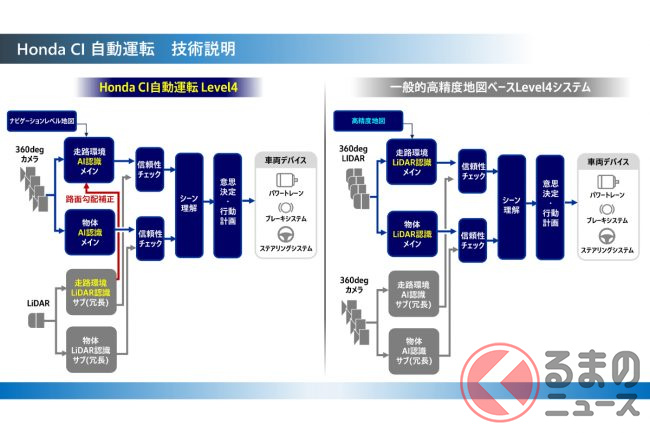
この実証実験は2月2日に小田原市橘地域で開始されたもので、本プロジェクトの最大の特徴は、高精度地図に頼らないホンダ独自の協調人工知能「Honda CI(Cooperative Intelligence)」を活用している点です。
従来の自動運転が「専用道路」を必要としたのに対し、ホンダは「今の街のまま」で走れる技術の確立を目指します。
協調人工知能の特徴について、本田技術研究所 先進技術研究所 知能化研究領域統括 エグゼクティブチーフエンジニアの安井裕司氏は次のように説明します。
「LLM(大規模言語モデル)などが急速に進化し、AIというのは何でもできるように思われているところもあるのですが、実は人間が働きかけないと応答してくれない。ワンメイクなんです。
協調人工知能というのは、人からインプットを受けて、自分でもまた人に対して働きかけをする。
他者の行動を見て、自分で動きをまた決めていくということで、振る舞いや意図などを認識し言葉のキャッチボールができる、そんなAIになっています。なので、オペレーティングがしやすい。
それによってロボットとAIと人が、人と人とのように信頼し合いながら協調・共存する社会を実現できるAIだと考えています」

説明会にて登壇した小田原市都市部副部長の金子明弘氏は、市内の公共交通が直面している厳しい現状を吐露しました。
「小田原市は5社6路線の鉄道網、4社の路線バスにより公共交通ネットワークが形成されていますが、路線バスは利用者の減少や運転手不足により、減便や廃止を余儀なくされています。
運行経費の補助だけでは解決できない段階にきており、自動運転技術に大きな期待を寄せています」
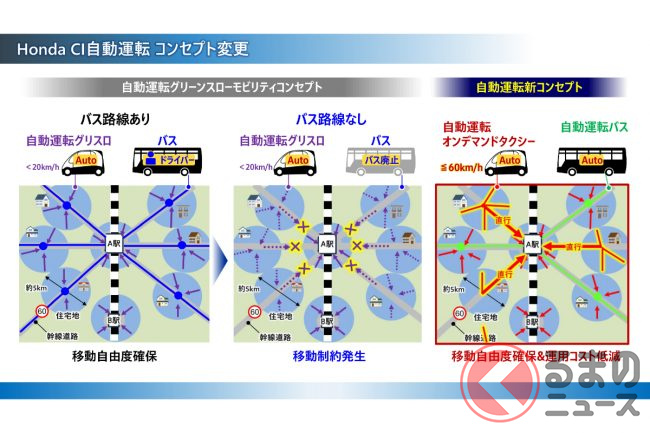
これまでホンダは、ラストワンマイルの課題を解決するべく茨城県常総市などで時速20km未満の低速モビリティ「グリーンスローモビリティ」を用いた実証を行ってきました。
しかし、現在はコンセプトを変更し開発を進めています。安井氏は、その理由を次のように話します。
「グリーンスローモビリティとバスや電車など公共交通機関の組み合わせによって、免許返納した人や運転が苦手な人の街中の安全、自由な移動を確保していくことができるだろうと考えていました。
しかしながら、小田原市の方を始め様々な自治体と話していると、運転手の不足によりバス路線が廃線になっているという話がどんどん聞こえてくる。
これは、バス路線を代替するレベルの自動運転技術を持っていないと、最終的に交通課題を解決できないのではないかという結論に至りました」
バス路線の代替や広域移動をカバーするためには、より高い速度域での運用が不可欠です。
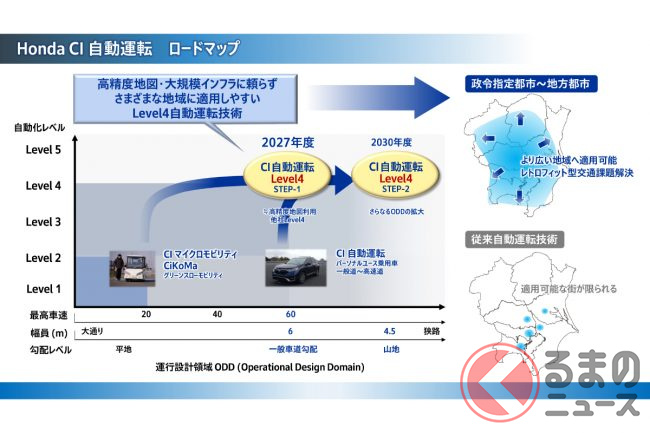
そこでCI自動運転のコンセプトを変更すると共に、今回小田原では時速60kmまでの「中速域」への対応と、特定条件下での自動運転レベル4の認可取得を見据えた実証実験を行っています。
ホンダの自動運転システムが他社と一線を画すのは、膨大なコストと手間がかかる「高精度地図」を使用しない点です。
「高精度地図を使うシステムは、範囲を広げるほど地図のメンテナンス費用が膨大になります。
私たちのAIベースのシステムは、データを集めるほど賢くなり、領域を広げてもコストを抑えられるメリットがあります。
レトロフィット型、つまり今の道路環境を壊さずに先端技術を後付けするアプローチで地域に貢献したいと考えています」(安井氏)
 |
 |
|---|---|
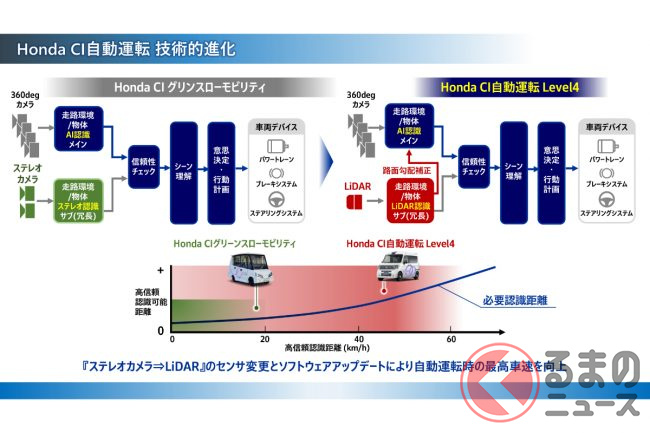
今回の小田原での実験では、これまでの「カメラ主体」の構成から、レーザー光を使って物体の位置や形状を正確に測る「LiDAR(ライダー)」を用いたものに変更しました。
従来(グリーンスローモビリティ)は360度カメラとステレオカメラを採用していましたが、高速域になると物体や構造物の位置情報がカメラだけでは認識できません。
そこでステレオカメラの代わりにLiDARを採用し、AIのソフトウェアアップデートも行うことで、遠方の物体検知能力を高め、時速60km走行時でも十分な安全性を確保できる冗長性を備えました。
実証フィールドとして小田原が選ばれた理由は、その「過酷な地形」にあります。
海岸線から一気に丘陵地帯へと続く小田原の道は、勾配の変化が激しく、AIにとっては難所です。
「AIによる走路認識は、路面に勾配があると位置精度の確保が難しくなります。
小田原のチャレンジングなコースは、システムを鍛え上げるのに最適な場所です」(安井氏)
LiDARの搭載は、勾配変化による誤差を補正する狙いもあります。
使用車両は、まずセンサー類を搭載した「CR-V」からスタートし、実証期間中に新型軽商用EV「N-VAN e:」へと移行する予定です。これにより、移動の自由とカーボンニュートラルの両立を目指します。
CR-VのルーフにはLiDARが設置されており、カメラは計7つ(フロント2つ、サイドに2つずつ、リア1つ)搭載されています。
また、CR-Vに元々装備されているホンダセンシングの魚眼カメラも周囲の状況を把握するのに使用されているとのことです。
 |
 |
|---|---|
実証実験は、毎週月曜日から金曜日のうち週1〜3日程度、通勤・通学の混雑時間を避けた日中に実施。
自動運転走行中の車両には「自動運転技術実証実験中」のマグネットが掲出されます。
まずは、運転席に安全監視員が乗車する自動運転レベル2で、時速20kmの低速走行会から開始。
安全性を確保しながら順次走行速度を上げ、走行エリアを拡大していく予定です。
ステップは4つに分けられており、現在は「STEP1」として西湘テクノパーク周辺の工業団地内を走行中ですが、今後は「STEP2」として主要幹線道路である小田原中井線へとエリアを拡大していく計画です(STEP3以降は今後詳細を協議)。
ホンダは、まずは2027年度に最高時速60km・幅員6m以上の道路といった特定条件下でのレベル4認可取得を目指し、小田原の坂道でその精度を磨き上げます。
その後2030年度には、さらに運行設計領域(ODD)を拡大し、住宅地のすれ違いや山道などにも対応。広い地域への適応を目指すロードマップを掲げています。

小田原市でのサービス事業化については現在未定ですが、金子氏は「まずバス停までが遠いという声もあるので、細い道にも入れるワンボックスカーなども需要があると考えており、車両タイプやサービスを展開する事業者などを今後検討していきたい」と話しました。
※ ※ ※
このCI自動運転技術は車両のタイプに制限なく展開が可能で、ホンダは今後マイクロモビリティ、乗用車、さらにはバスなどの商用車まで、幅広い車両への搭載を視野に入れているとのこと。
日本の移動の未来を支えるべく、自動運転の実現を目指すホンダの取り組みは着実にステップを進めています。





























Writer: くるまのニュース編集部
【クルマをもっと身近にするWEB情報メディア】
知的好奇心を満たすクルマの気になる様々な情報を紹介。新車情報・試乗記・交通マナーやトラブル・道路事情まで魅力的なカーライフを発信していきます。クルマについて「知らなかったことを知る喜び」をくるまのニュースを通じて体験してください。









































